UWB技术介绍
UWB(超宽带技术)是什么
uwb(超宽带技术)是一种全新的、与传统通信技术有极大差异的通信新技术。它不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,从而具有GHz量级的带宽。 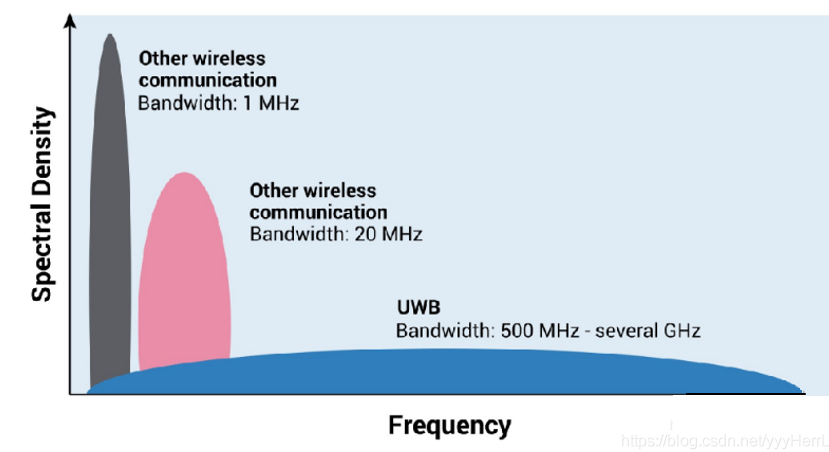
UWB的特点
- 超宽频,其频率覆盖从 3G
5G,6G10G 共 7G 的频段,单信道带宽超过 500MHz - 功率低,按 FCC 等法规,其输出功率被限制在-41dBm/MHz,按单个信道 500MHz计算,其信道功率为-14.3dBm
- 超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点
优点
- 功耗更低
- 抗干扰能力更强
- 传输效率更高
- 抗多径能力更强
- 防窃听
影响UWB信号质量因素
- 多径效应影响 超宽带UWB信号在传播过程中,会受到周围环境如墙壁、玻璃和桌面等室内物品的反射和折射的影响,产生多路径效应。信号在延迟、幅值和相位等方面的变化,从而产生能量衰减,信噪比下降,导致首达信号并非直达信号,引起测距误差,UWB定位精度也随之下降。
- 多址效应影响 在多个用户环境下,其他用户的UWB信号会干扰目标信号,从而降低了估计的准确性。减小这种干扰的一种方法就是把来自不同用户的信号从时间上分开,也即对不同节点使用不同的时隙进行传输。
- NLOS(非视距信号传播)的影响 视距传播(LOS)是保证信号测量结果准确的首要、必要的前提条件,当移动定位目标和UWB基站之间不能满足条件时,UWB信号的传播只能在折射和衍射等非视距条件下完成,达到接收终端。此时第一个到达的脉冲的时间并不代表TOA的真实值,首达脉冲的方向也不是AOA的真实值,这样就会造成一定的定位误差。
- UWB穿透遮挡物信号减弱对UWB定位精度的影响 UWB信号穿透普通的砖墙时,信号值会减弱将近一半左右。因穿透墙体引起的信号传输时间的变化也会影响定位精度。 各类遮挡物对UWB信号穿透的影响程度如下所示:
- 实体墙:一堵实体墙的这种遮挡将使得UWB信号衰减60-70%,定位精度误差上升30厘米左右,两堵或者两堵以上的实体墙遮挡,将使得UWB无法定位。
- 钢板:钢铁对UWB脉冲信号吸收很严重,将使得UWB无法定位。
- 玻璃:玻璃遮挡对UWB定位精度没太大影响。
- 木板或纸板:一般厚度10厘米左右的木板或纸板对UWB定位精度没太大影响。
- 电线杆或树木:线杆或者树木遮挡时,需要考虑它们之间距离UWB基站或者标签的距离。比如,UWB基站和定位标电签间距50米,电线杆或者树木正好在两者中间,25米处,这种遮挡就无大的影响,如离UWB基站或标签距离很近,比如小于1米,影响就很大。
- 无线干扰对UWB设备精度的影响 由于UWB信号的脉冲持续时间很短,可以认为接受的信号与干扰脉冲是不相关的,因此,经相关处理后,它们的影响可以忽略不计
UWB的应用
测距
UWB测距主要采用双向测距(Two-way Ranging)方法,以下所有的方法都包括两个节点:设备A和设备B,默认设备A是测距的发起者,设备B是响应者;双向测距主要分为以下两种方法(1和2):
- 单边双向测距(Single-sided Two-way Ranging)
- 双边双向测距(Double-sided Two-way Ranging)
单边双向测距(Single-sided Two-way Ranging)
单边双向测距(Single-sided Two-way Ranging),单侧双向测距(SS-TWR)是对单个往返消息时间上的简单测量,设备A主动发送数据到设备B,设备B返回数据响应设备A。 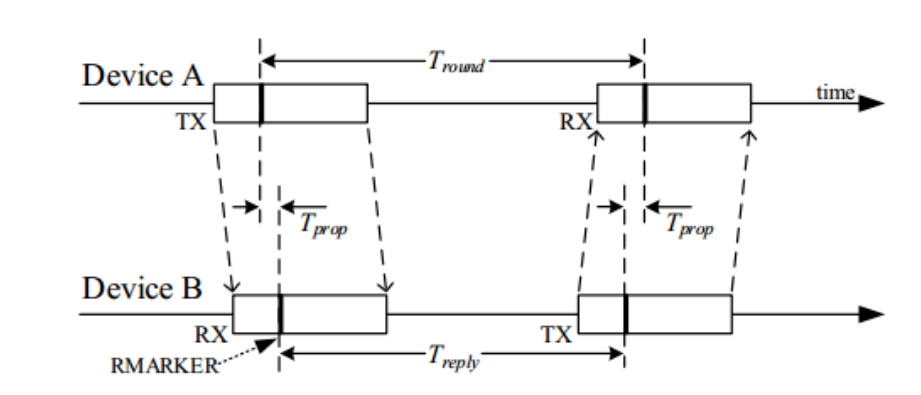
测距流程
设备A(Device A)主动发送(TX)数据,同时记录发送时间戳,设备B(Device B)接收到之后记录接收时间戳;延时Treply之后,设备B发送数据,同时记录发送时间戳,设备A接收数据,同时记录接收时间戳。 所以可以拿到两个时间差数据,设备A的时间差Tround和设备B的时间差Treply,最终得到无线信号的飞行时间Tprop如下: 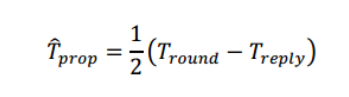 两个差值时间都是基于本地的时钟计算得到的,本地时钟误差可以抵消,但是不同设备之间会存在微小的时钟偏移,假设设备A和B的时钟偏移分别为eA和eB,因此得到的飞行时间会随着Treply的增加而增加,测距误差的方程如下:
两个差值时间都是基于本地的时钟计算得到的,本地时钟误差可以抵消,但是不同设备之间会存在微小的时钟偏移,假设设备A和B的时钟偏移分别为eA和eB,因此得到的飞行时间会随着Treply的增加而增加,测距误差的方程如下:  Treply越小,测距越准确。另外Treply不仅仅是设备B接收到发送的时间,也包括装载数据和发送数据耗费的时间(UWB除了支持定位之外,也可以传输数据,标准可以装载128字节,扩展模式可以装载1024字节数据) 随着Treply和时钟偏移的增加,会增加飞行时间的误差,从而使得测距不准确。 因此单边双向测距(SS-TWR)并不常用,但对于特定的应用,如果对于精度要求不是很高,但是需要更短的测距时间可以采用。
Treply越小,测距越准确。另外Treply不仅仅是设备B接收到发送的时间,也包括装载数据和发送数据耗费的时间(UWB除了支持定位之外,也可以传输数据,标准可以装载128字节,扩展模式可以装载1024字节数据) 随着Treply和时钟偏移的增加,会增加飞行时间的误差,从而使得测距不准确。 因此单边双向测距(SS-TWR)并不常用,但对于特定的应用,如果对于精度要求不是很高,但是需要更短的测距时间可以采用。
双边双向测距(Double-sided Two-way Ranging)
双边双向测距(Double-sided Two-way Ranging)是单边双向测距的一种扩展测距方法,记录了两个往返的时间戳,最后得到飞行时间,虽然增加了响应的时间,但会降低测距误差。双边双向测距根据发送消息个数不同,分为两种方法:
- 4消息方式(4 messages)
- 3消息方式(3 messages)
双边双向测距4消息方式
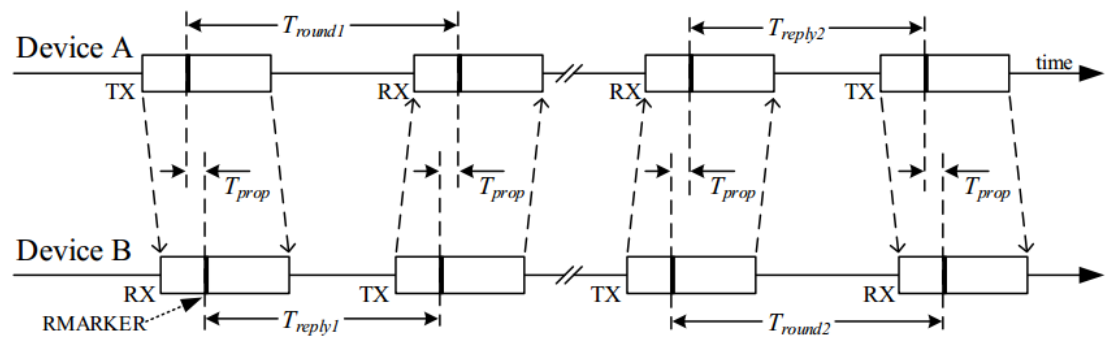
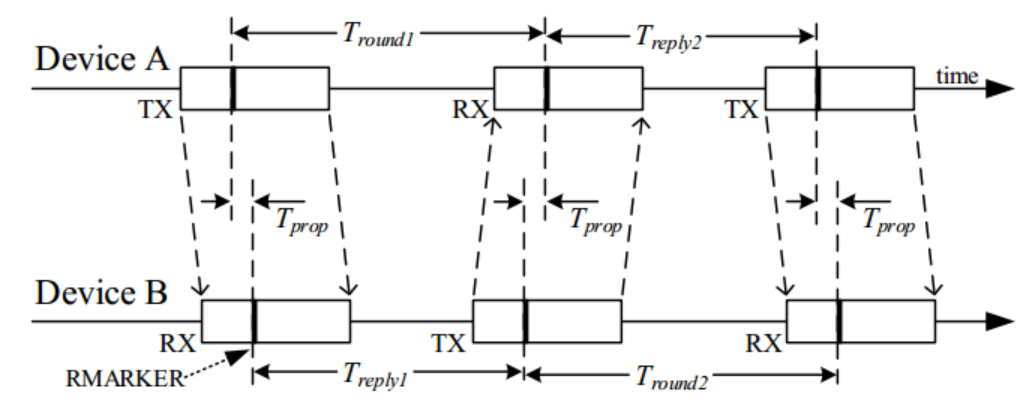
分为两次测距,设备A主动发起第一次测距消息,设备B响应,得到4个时间戳;然后过了一段时间,设备B主动发起测距,设备A响应,同样得到4个不同的时间戳。最终可以得到如下四个时间差:
- Tround1
- Treply1
- Tround2
- Treply2
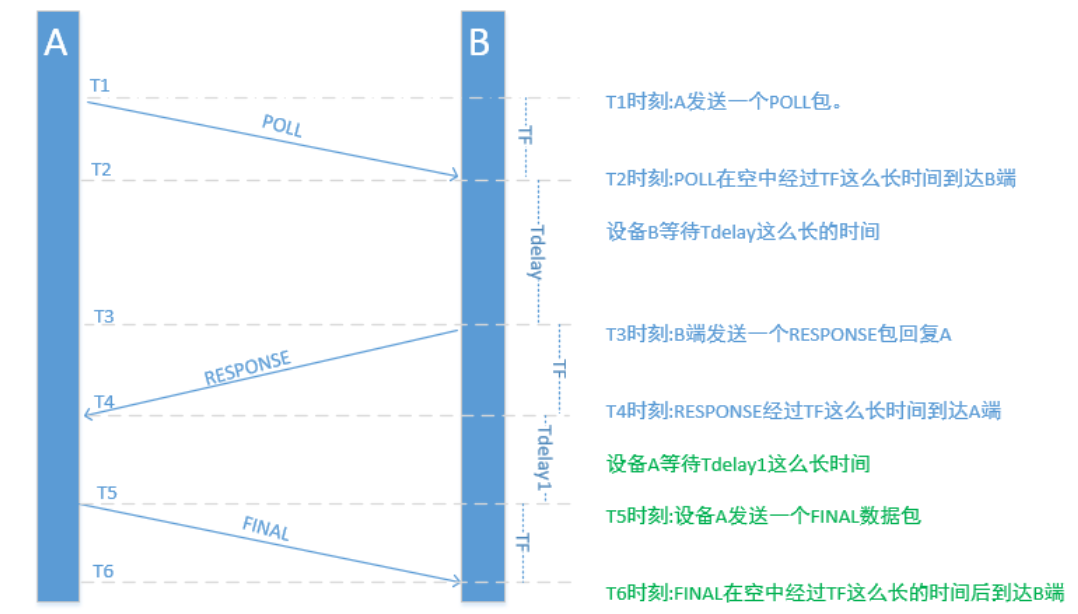
双边双向测距3消息方式
相比较于4消息方式,省掉了第二次测距的发起动作,当设备A收到数据之后,立刻返回数据,最终也可以得到如下四个时间差:
- Tround1
- Treply1
- Tround2
- Treply2
双边双向测距飞行时间计算方法
飞行时间计算方法,无论是4消息方式或者3消息方式,都可以使用如下公式计算: 
双边双向测距飞行时间误差分析
以上测距的机制都是非对称的测距方法,因为他们对于响应时间不要求是相同的。使用3消息和4消息的方法测距,即便使用20ppm的晶体,时钟误差也是在ps级别的。误差公式如下: 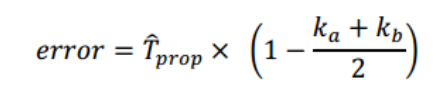 设备A以需要的频率Ka运行,设备B以需要的频率Kb运行,Ka和Kb都是接近于数值1的。 注意:响应时间是不需要相等的,也及时Treply1不一定要等于Treply2,这样对于MCU系统的处理带来了很多便利。 主要的误差来源一定是接收数据的时间戳是否正确。而不是晶体的ppm值。
设备A以需要的频率Ka运行,设备B以需要的频率Kb运行,Ka和Kb都是接近于数值1的。 注意:响应时间是不需要相等的,也及时Treply1不一定要等于Treply2,这样对于MCU系统的处理带来了很多便利。 主要的误差来源一定是接收数据的时间戳是否正确。而不是晶体的ppm值。
双边双向测距(响应时间对称)
比较特殊的例子,双边双向测距方法响应时间对称,也就是Treply1和Treply2相等,飞行时间计算方法如下:  这种方法只是需要一些时间戳做加减法,然后除以4就可以得到飞行时间,但是可能需要更多的时间。另外这种方法的难点在于,怎么保证Treply1和Treply2是相等的。
这种方法只是需要一些时间戳做加减法,然后除以4就可以得到飞行时间,但是可能需要更多的时间。另外这种方法的难点在于,怎么保证Treply1和Treply2是相等的。
ToF测距
实现方法

优点
- 实现简单
- 由于UWB的高带宽(500 MHz),脉冲宽度为纳秒级,这提高了精度。精度低(相对高精度)
缺点
- 时钟源导致Tdelay时间不精确
- 设备B可能超时响应
- 介质影响
TW_ToF:对ToF的改进
TOA
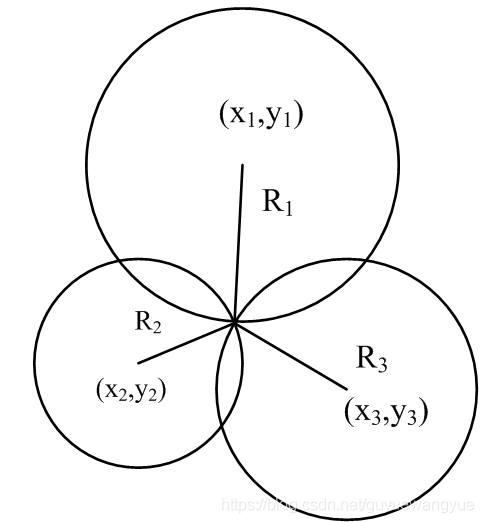
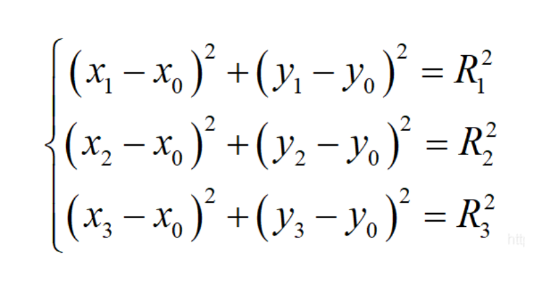
- TOA(Time of Arrival)测距的基本原理是得到UWB脉冲信号到达各个基站的时间,利用了UWB脉冲信号到各个基站间距离R与信号传播时间t成正比例关系
- TOA定位俗称圆周定位,即根据测量的距离为半径进行画圆,通过圆的交点确定标签的位置,所以至少需要有三个基站。以测得到三个基站的距离为半径进行画圆,绘出的三个圆将会有一个共同的交点,三个圆共同的交点即为标签所在位置,即可实现定位
- TOA测距要求知晓测距信号的传输开始时刻和奇数时刻,要求基站节点和信标节点的时钟保持高度同步,微小的时间误差就将导致较大的测距误差,所以其适用性大大降低
定位
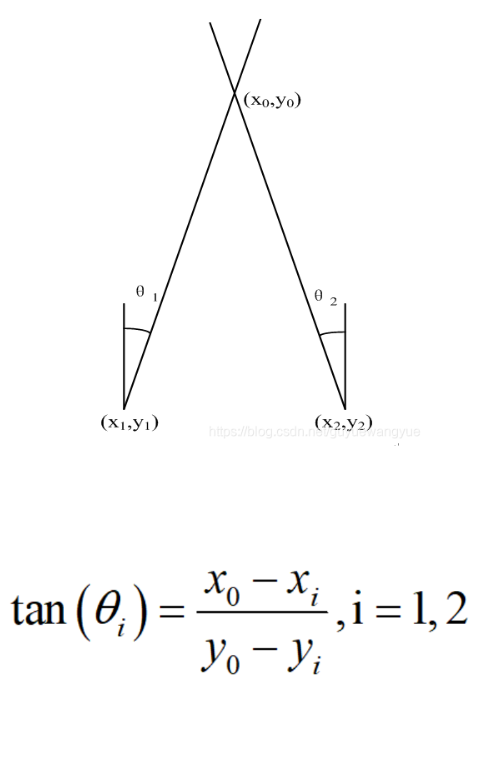
AOA/DOA
- 基于AOA(Angle of Arrival)的距离测量方法是通过测量信号到达的角度求解目标的位置。基于DOA(Direction of Arrival)的距离测量方法是指空间信号到达的方向。因此AOA和DOA本质上是一个概念
- DOA定位是利用接收信号的天线具有方向性,基于信号的入射角度进行定位的。因为是测量标签与基站之间的角度得到的定位信息,所以至少需要两个已知的UWB基站。根据标签与基站之间的角度,绘制两条直线,两条直线的交点即为标签的位置
- 这种方法是通过计算两条线之间的交点来进行定位的,两条线的交点只有一个,为了测量UWB脉冲信号的入射角度,基站必须装备方向敏感的天线阵列。由于使用此方法测得的角度若有一点误差,将会引起定位的较大误差,并且不适合于非视距条件下的传输,所以该方法不常使用在室内定位中。
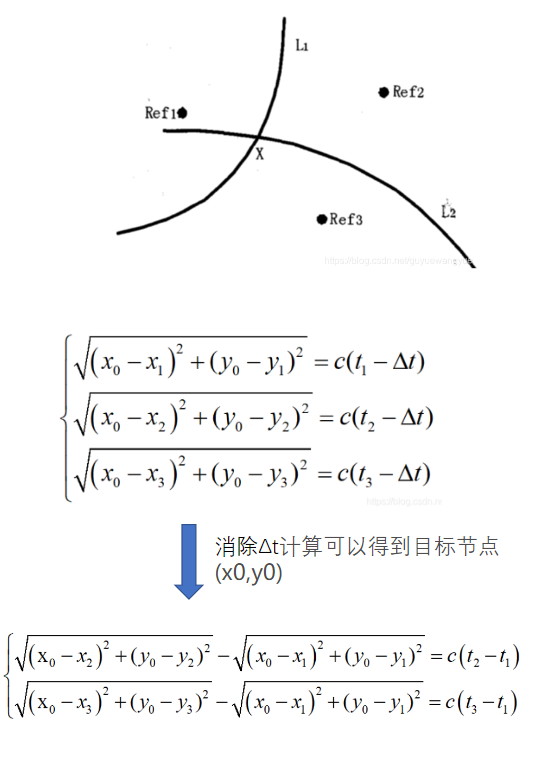
TDoA定位(Time Difference of Arrival)
TDOA(Time Difference of Arrival)是一种利用时间差进行定位的方法,TDOA定位算法是利用不同基站节点接收到的同一标签节点的定位信号的时间差来计算标签节点到不同参考节点的距离差, 由此可以得出参考节点间的双曲线,双曲线的交点即为标签节点的位置
实现方式
在已知的固定场所部署多个参考点,称为“锚点”,且这些锚点在时间方面实现了紧密同步。 移动设备定时发送信息,各锚点根据接受到信息时间差计算设备位置 反向TDoA类似GPS
缺点
提高了各个监测站的时间同步要求
RSSI
基于RSSI(Received Signal Strength Indication)的距离测量的关键在于建立将RSSI值精确转换成距离的关系模型,目前使用最广泛的是对数距离损耗模型: 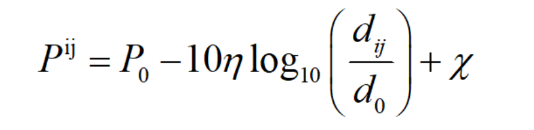
- \( p^{ij}\\)是节点i,j之间以dB为单位的功率路径损耗;\(p_0\)是参考距离\(d_0\)(一般\(d_0\ )=1m)处测量得到的功率;η是路径损耗因子;χ为阴影效应导致的零均值高斯随机变量,具体计算的时候通常忽略不计
影响RSSI测距的重要原因是射频的不规则性其中包括设备和传输介质两种因素。因此信标节点在测距的时候向基站节点发射测距信号,基站节点所接收到的信号功率将会考虑到以上因素。并且需要考虑到基站节点辐射信号的时候,电磁波能量的损耗,得到最后的距离测量模型。得到RSSI的距离测量模型之后,可以使用与TOA定位方法进行定位,两者定位方法不同之处在于测量距离的方式的不同。
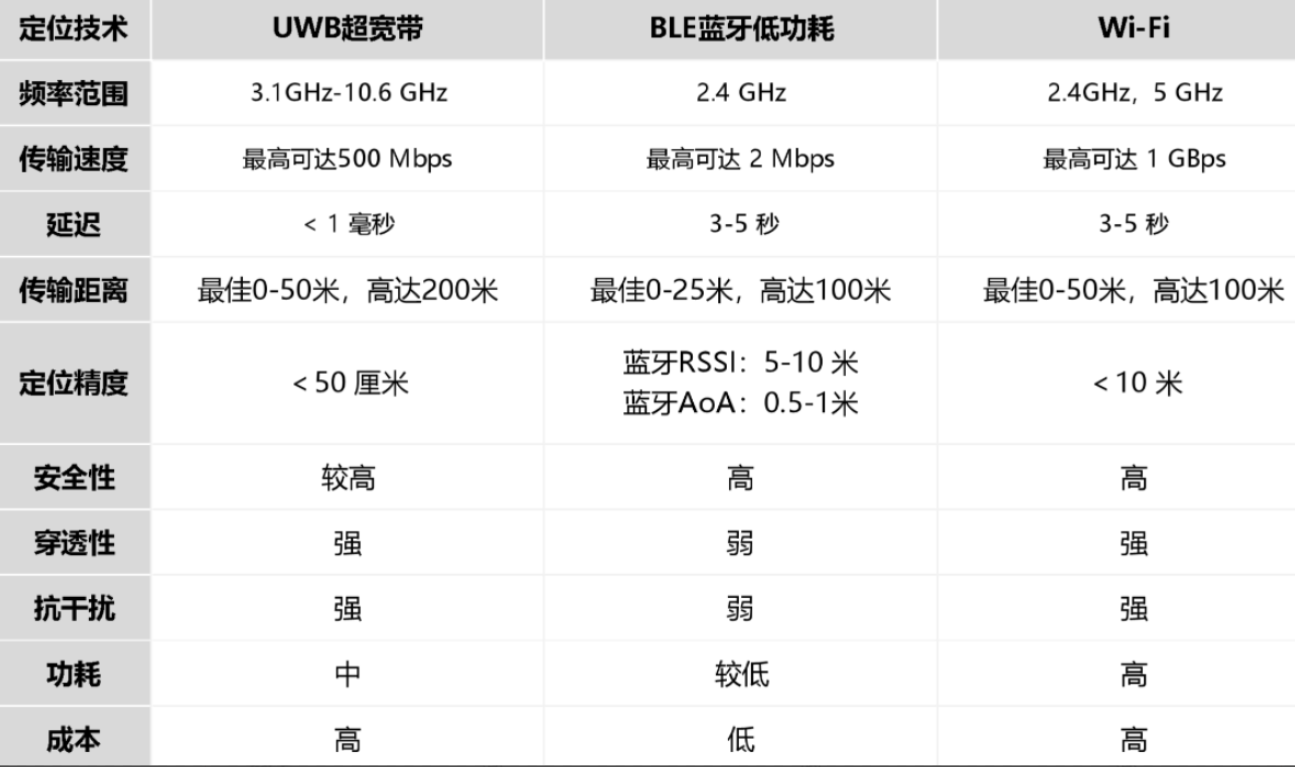
定位方式对比
UWB无线定位的优化
由于无线环境中情况复杂,并且以上提到的算法只是设计定位算法的起步,仅仅使用以上算法无法获得很满意的定位精度,所以需要针对以上的定位方法进行优化。可以针对无线环境进行算法的优化,也可以针对算法,进行算法的进一步优化。常用到的方法是将两种定位方法融合,进行融合测距,这样的定位精度也会提高。当然还有近场电磁测距优化、LMAP定位算法、机会定位和基于压缩感知的定位等等方法来提高无线定位的精度。
通信
UWB调制技术
- 脉位调制(PPM):脉冲的位置,利用脉冲位置承载数据信息的调制方式
- 脉幅调制(PAM):调节脉冲的幅度,常用的PAM有两种方式:开关键控(OOK,把一个幅度取为0,另一个幅度为非0)和二进制相移键控(BPSK)。
- 波形调制(PWSK):采用M个相互正交的等能量脉冲波形携带数据信息,每个脉冲波形与一个M进制数据符号对应。类似量子的旋转角度。可以在不增加辐射功率的情况下提高传输效率,复杂度较高
- PWM
UWB用于测距相关论文
- An Implementation of UWB IR System for Long Distance and High-precision Localization
- An Improved UWB Microwave Radar for Very Long-Range Measurements of Snow Cover
- Ultra-wide band technology experiments for real-time prevention of tower crane collisions